PWM
Tips:
Hz --- s
KHz --- ms
MHz --- us
1s = 10^3ms=10^6us
Hz = KHz = MHz
一:PWM基础
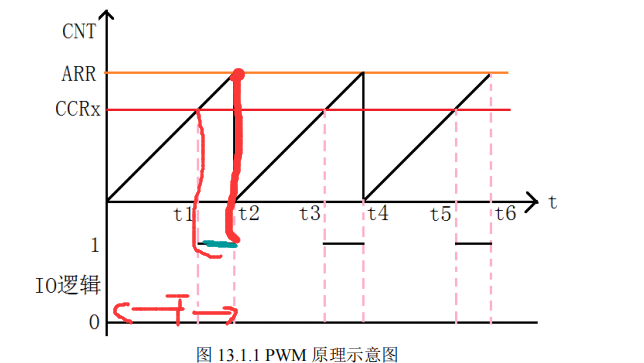
从示意图可以看出
①、ARR决定了周期;CCRx决定了占空比。所以调节CCRx就可以更改占空比。此图是假设当装载值比CCR小我们产生一个低电平
②、通过向TIMx_CCMRx寄存器中的OCxM位写入110(PWM模式1)或111(PWM模式2),可以独立选择各通道(每个OCx输出对应一个PWM)的模式。必须通过将TIMx_CCMRx寄存器中的OCxPE位置1使能相应的预装载寄存器,最后通过TIMx_CR1寄存器中的APPE位置1使能自动重载预装载寄存器
二、PWM输出配置步骤
①、使能定时器时钟和通道IO口时钟。
②、配置IO口复用映射
③、初始化PWM时基参数
④、初始化PWM通道参数
⑤、使能定时器PWM
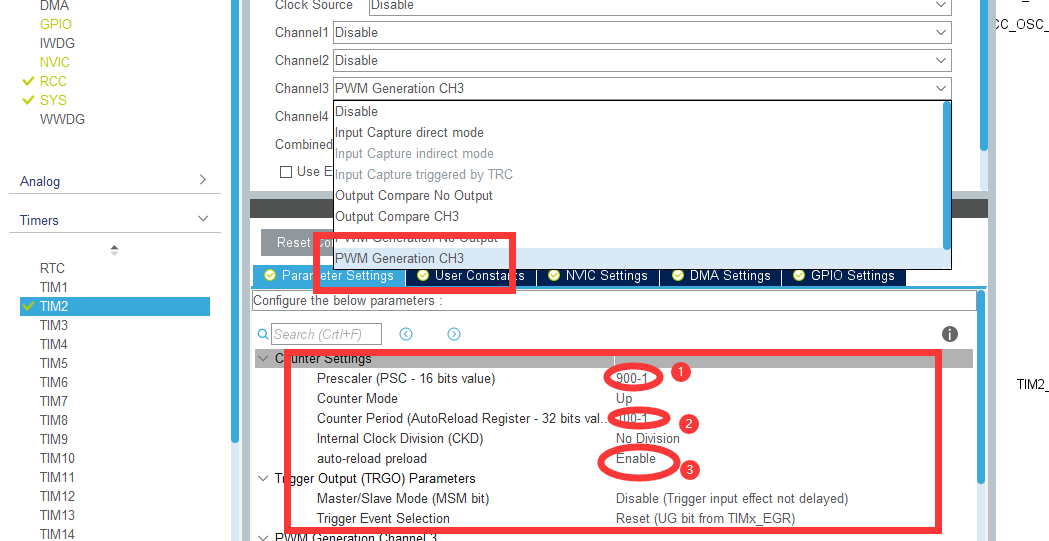
三、cubeMX的配置
在Parameter Settings中设置好Prescaler(预分频系数)、Counter Period(重装载值)、Pulse(脉冲时长), 一般习惯将PSC设置为主频*10-1,这样分频后一个周期刚好是1us,然后将ARR设置为100-1,这样每个周期就是1ms,频率也就为1KHz。而Pulse设置为占空比,设置为50,刚好为100的一半,则占空比为50%。 ————————————————
1)、点开定时器(例TIM2):
定时器的时间配置直接为PWM的周期(频率)
2)、这个地方写占空比。(不确定)

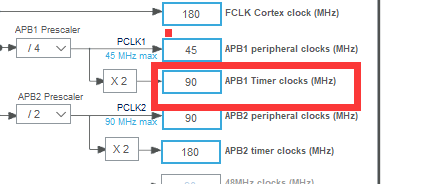
Tips:看时钟挂在哪个主线上(TIM2为PAB1上)
3)、生成工程
①、配置IO口复用映射
void HAL_TIM_MspPostInit(TIM_HandleTypeDef* timHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(timHandle->Instance==TIM2)
{
/* USER CODE BEGIN TIM2_MspPostInit 0 */
/* USER CODE END TIM2_MspPostInit 0 */
__HAL_RCC_GPIOA_CLK_ENABLE(); //使能GPIOA时钟
/**TIM2 GPIO Configuration
PA2 ------> TIM2_CH3
*/
GPIO_InitStruct.Pin = GPIO_PIN_2;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF1_TIM2;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
}
void HAL_TIM_PWM_MspInit(TIM_HandleTypeDef* tim_pwmHandle)
{
if(tim_pwmHandle->Instance==TIM2)
{
/* USER CODE BEGIN TIM2_MspInit 0 */
/* USER CODE END TIM2_MspInit 0 */
/* TIM2 clock enable */
__HAL_RCC_TIM2_CLK_ENABLE();
/* TIM2 interrupt Init */
HAL_NVIC_SetPriority(TIM2_IRQn, 0, 0); //设置串口中断优先级
HAL_NVIC_EnableIRQ(TIM2_IRQn); //使能中断通道
}
}
②、PWM时基参数设定
TIM_HandleTypeDef htim2; //句柄
/* TIM2 init function */
void MX_TIM2_Init(void)
{
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
htim2.Instance = TIM2;
htim2.Init.Prescaler = 89;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 999;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_PWM_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 500;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_3) != HAL_OK)
{
Error_Handler();
}
HAL_TIM_MspPostInit(&htim2);
}
③、使能定时器PWM
if(HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_3) != HAL_OK)
{
Error_Handler();
}
四、工程中的书写(即使能定时器)
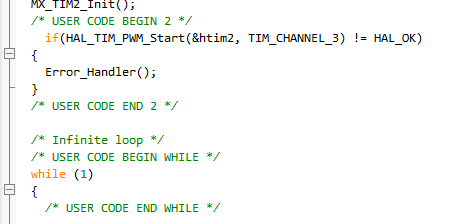
if(HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_3) != HAL_OK)
{
Error_Handler();
}
写入这个函数即可放出PWM(PWM_Start开始),一定要在主函数里面写开始函数
&htim2, TIM_CHANNEL_3
| |
TIM2 通道3
五、☆程序中更改占空比☆
time.c中
/* @x:定时器几 */
/* @y:定时器的通道*/
void TIM_SetTIMxCompare1(uint32_t compare)
{
TIMx->CCRy=compare; //把比较值直接传入TIM的CCR比较寄存器
}
tinme.h中申明
void TIM_SetTIMxCompare1(uint32_t compare);
main.c
/*头文件声明、变量申明省略*/
int main()
{
TIM_SetTIMxCompare1(占空比);
while(1)
{}
}
六、OLED显示PWM占空比程序
①、为了方便使用,把time.c中的TIM_SetTIMxCompare1(uint32_t compare)放到main.c中,同样的在main.h中进行申明
②、写一个OLED显示函数void OELD_PWM_display(uint32_t A)参数定义为uint32_t类型
main.c中
#头文件省略...
#include "stdio.h" //sprintf 函数头文件
uint8_t Str_buff[64]; //缓存数组
int main()
{
TIM_SetTIM2Compare1(占空比);//占空比更改函数的调用。
while(1)
{}
}
void OELD_PWM_display(uint32_t A) //OLED显示函数(详细)。
{
OLED_Init();
OLED_Clear();
/*---OLED显示---*/
OLED_ShowString(0,0,(uint8_t *)"PWM = ");
sprintf((char *)Str_buff,"%d", A);
OLED_ShowString(54,0,(uint8_t *)Str_buff);
OLED_ShowString(70,0,(uint8_t *)"%");
/*----------------*/
}
void TIM_SetTIM2Compare1(uint32_t compare) //改变PWM占空比函数。
{
TIM2->CCR3=compare;
OELD_PWM_display(compare); //调用OLED显示函数,传递的参数就是compare的值,让他在OLED上显示。
}
③、Tips:在配置PWM的时候period的值需要特别注意:☆如果是Period的值在0-100期间,则comper 的值就是0-100,给多少占空比就是多少;同理,Period 的值在0-1000期间,comper 的值也会在0-1000,例如500对应占空比为50%。
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
htim2.Instance = TIM2;
htim2.Init.Prescaler = 900-1;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 100-1;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_PWM_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
七、PWM实现呼吸灯
1)、cubeMX配置
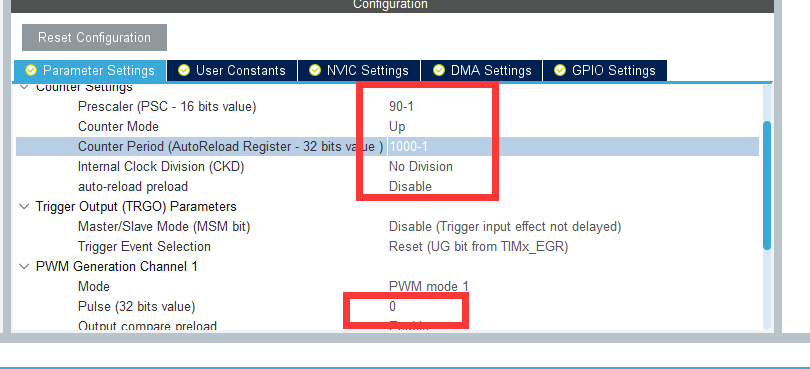
配置参数(最好!!把Per的值配到上千,之后写控制占空比时可以让时间加长一点) 占空比此时不用初始设置,默认为0
2)、程序中的配置
设置Pulse的值可以修改脉宽。这里我们在main.c文件中添加一个用户PWM设置函数,函数的参数为修改的值。
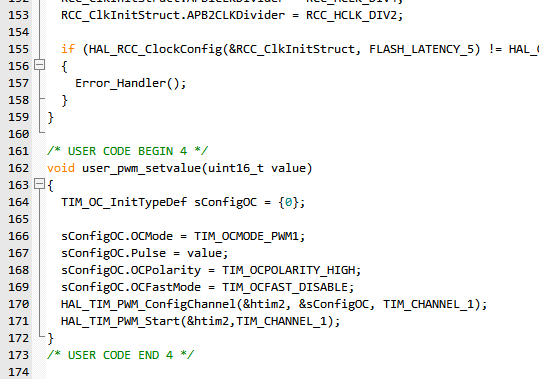
/* USER CODE BEGIN 4 */
void user_pwm_setvalue(uint16_t value)
{
TIM_OC_InitTypeDef sConfigOC = {0};
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = value;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_1);
}
/* USER CODE END 4 */
Tips:记得在头文件下面申明该函数。
3)、主函数里面写控制PWM占空比的程序
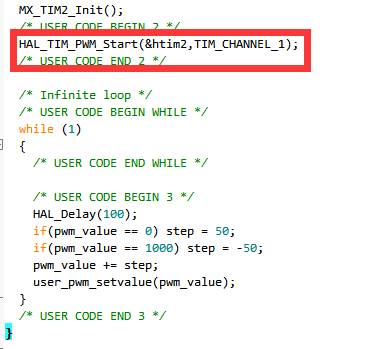
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_Delay(100);
if(pwm_value == 0) step = 50; //延时100ms之后让占空比的值减50
if(pwm_value == 1000) step = -50; //1000是配置的per
pwm_value += step;
user_pwm_setvalue(pwm_value);
}
记住打开PWM,使用HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_1);
Pulse的值最大为1000,从0开始,每100ms增加50,当增加到1000时,又逐渐递减到0。最后吧pwm_value传进去。