STM32F4定时器
一、STM32的定时器资源
■ 系统嘀嗒定时器Sys Tick 这是一个集成在Cortex M3内核当中的定时器,它并不属于芯片厂商的外设,也就是说使用ARM内核的不同厂商,都拥有基本结构相同的系统定 时器。主要目的是给RTOS提供时钟节拍做时间基准。 ■ 看门狗定时器WatchDog ■ 实时时钟RTC . ■ 基本定时器: TIM6、 TIM7 ■ 通用定时器: TIM2、 TIM3、TIM4、 TIM5 在基本定时器的基础上,实现输出比较、输入捕获、PWM生成、单脉冲模式输出等功能。这类定时器最具代表性,使用也最广泛。 ■ 高级定时器: TIM1、 TIM8
——定时器挂的总线:
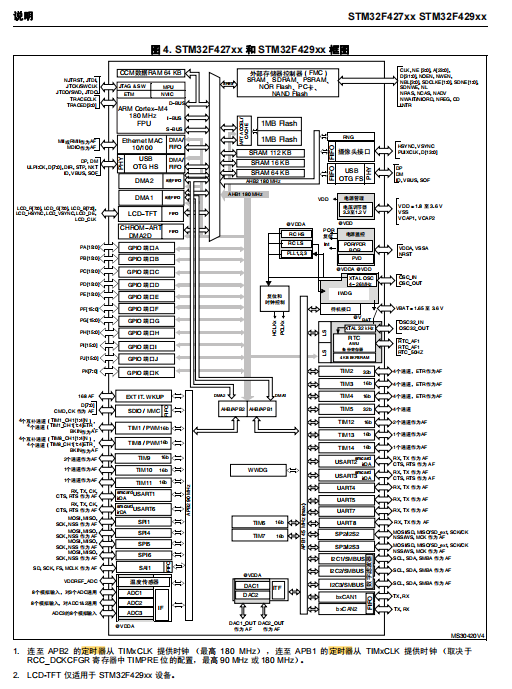
Tips:图片参照《STN32F4xx数据手册》第十八页
二、通用定时器
首先,定时器时钟信号送入16位可编程预分配器(Prescaler) ,该预分 配器系数为0~65535之间的任意数值。预分配器溢出后,会向16位的主 计数器( Counter Period)发出一个脉冲信号。 预分频器,本质上是一个加法计数器,预分频系数实际上就是加计数的溢出值。 定时器发生中断时间的计算方法:
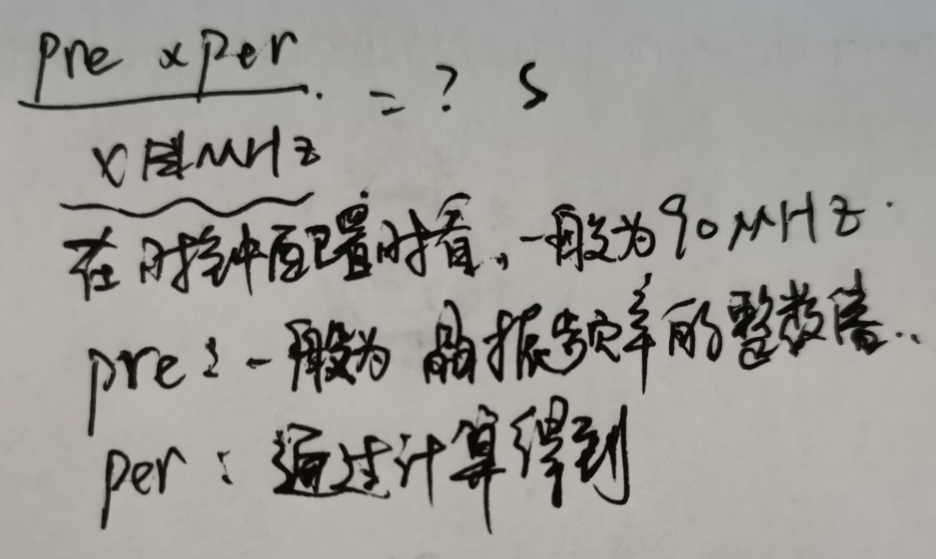
定时时间= (Prescaler+1 ) X (Counter Period+1)X 1/定时器时钟频率
Tips:Prescaler、Counter Period都不能超过2^16
三、定时器cubeMX工程的建立
配置好基本的参数之后打开定时器一栏

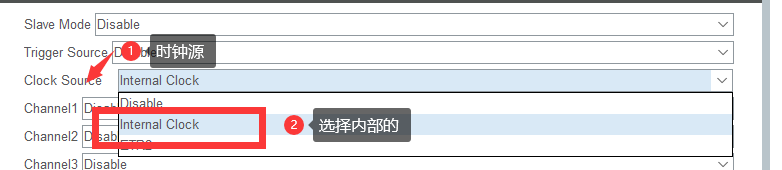
2.选择时钟源
3.计算分频系数、16位自动重装载值。
 s
sTips1:两个都不能超过2^16
Tips2:设置预分频系数和自动重装载值为十六进制:
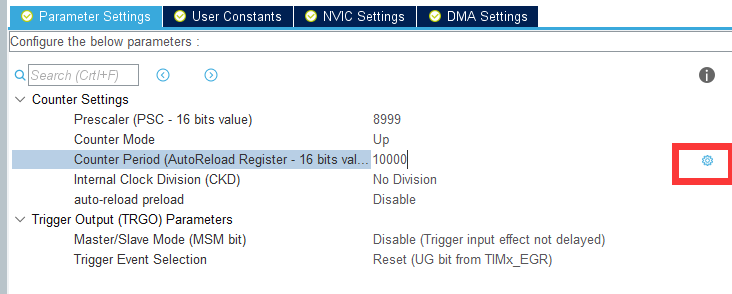
4.打开计数器使能端口:

- Prtscaler (定时器分频系数) : 7199
- Counter Mode(计数模式) Up(向上计数模式)
Counter Period(自动重装载值) : 4999
CKD(时钟分频因子) : No Division 不分频 ;选项: 可以选择二分频和四分频
auto-reload-preload(自动重装载) : Enable 使能
TRGO Parameters 触发输出 (TRGO) 不使能 与本节无关,之后做详细介绍
TRGO: 定时器的触发信号输出 在定时器的定时时间到达的时候输出一个信号(如:定时器更新产生TRGO信号来触发ADC的同步转换,)
四、程序的书写
![]()
- 打开stm32f4xx_it.c文件-->打开之后找到
void TIM2_IRQHandler(void)函数里面的HAL_TIM_IRQHandler(&htim2);在跳转到该函数的定义:
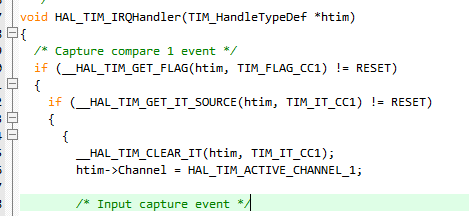
在该函数里面找到一个中断回调函数:

在tim.c中重写该回调函数
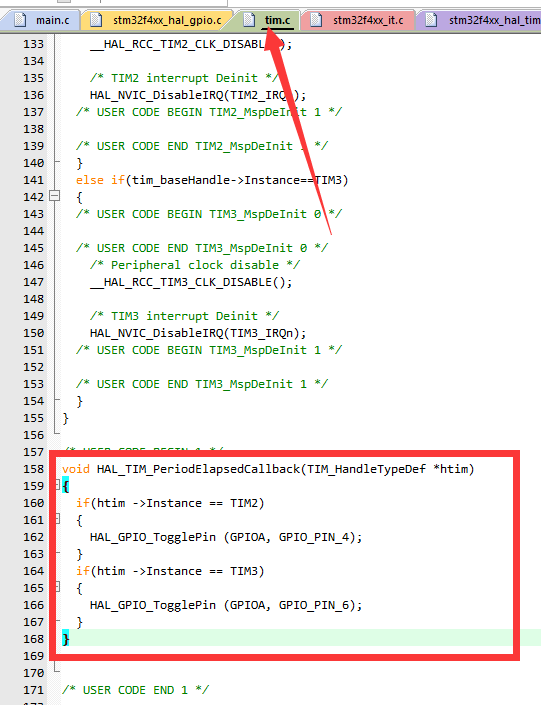
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim ->Instance == TIM2) //判断是TIM2时执行下面的内容
{
HAL_GPIO_TogglePin (GPIOA, GPIO_PIN_4);
}
if(htim ->Instance == TIM3) //判断是TIM3时执行下面的内容
{
HAL_GPIO_TogglePin (GPIOA, GPIO_PIN_6);
}
}在stm32f4xx_hal_tim.c中找到
HAL_StatusTypeDef HAL_TIM_Base_Start_IT(TIM_HandleTypeDef *htim)该函数为中断初始化:
复制函数“
HAL_TIM_Base_Start_IT(TIM_HandleTypeDef *htim)”到主函数:
括号里面写定时器地址。
定时器配置完成
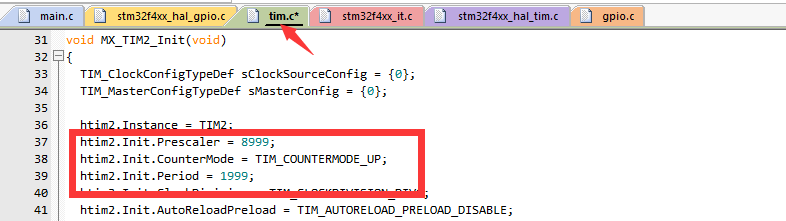
Tips:要在代码层面修改定时器初始值在:tim.c中修改两个值即可